
Acestea sunt notițele mele despre obținerea unor date LiDAR și testarea a diverse comenzi în PDAL. Dacă vrei, le poți urmări folosind datele tale.
Probabil voi mai adăuga sau șterge lucruri, dar poți arunca o privire să vezi unele dintre principalele operații care pot fi făcute pe date de tip nor de puncte (point cloud) folosind PDAL.
Aceasta este o adaptare a seminarului original de pe website-ul PDAL, Point Cloud Processing and Analysis with PDAL, singura diferență fiind că eu folosesc aceleași date pentru fiecare operație și afișez și output-ul comenzilor, în timp ce în seminar sunt folosite surse diferite de date.
Seminarul poate fi descărcat și de aici.
Poți folosi Fugro Viewer sau LASTools pentru a vizualiza fișiere LiDAR pe desktop, dar doar în Windows! Utilizatorii de Linux, deși uitați, sunt norocoși să aibă Potree și Plasio care pot accesa seturi de date Entwine Point Tile (EPT) în browser. Dar hai totuși să abordăm LiDAR cu pași mici înainte de a săpa prea mult. 🙂
LiDAR este o tehnică de teledetecție care folosește energia laser vizibilă sau infraroșu-apropiat să măsoare distanța dintre un senzor și un obiect. Senzorii pot fi tereștri (pe tripod), aerieni (avion), mobili (mașină) și fără pilot (drone).
PDAL, Point Data Abstraction Library, reprezintă o bibliotecă open-source C/C++ și aplicații pentru transformarea și procesarea datelor de tip point cloud.
Nu voi intra în detalii despre LiDAR, poți citi dacă vrei acest ghid cuprinzător: Lidar 101: An Introduction to Lidar Technology, Data, and Applications.
What we're doing here?
Descarcă datele
Poți folosi propriile fișiere, eu voi folosi date gratuite pentru vulcanul Taal din Filipine. Acest vulcan are o poveste tristă, a erupt recent, în ianuarie.
Am descărcat fișiere LiDAR în format comprimat LAZ, de pe Taal Open LiDAR, după ce am aflat de sursă de pe rapidlasso GmbH. Datele au fost colectate pentru UP TCAGP și Programul PHIL-LiDAR (detalii). Sunt mai multe fișiere LAZ de 1 metru rezoluție care acoperă fiecare o arie de 1000 pe 1000 metri:
.
└── raw_data
├── E280N1553_LAZ_PL1.laz
├── E281N1547_LAZ_PL1.laz
├── E281N1548_LAZ_PL1.laz
├── E281N1549_LAZ_PL1.laz
├── E281N1550_LAZ_PL1.laz
├── E281N1551_LAZ_PL1.laz
├── E281N1552_LAZ_PL1.laz
├── E281N1553_LAZ_PL1.laz
├── E282N1547_LAZ_PL1.laz
├── E282N1548_LAZ_PL1.laz
├── E282N1549_LAZ_PL1.laz
├── E282N1550_LAZ_PL1.laz
├── E282N1551_LAZ_PL1.laz
├── E282N1552_LAZ_PL1.laz
├── E282N1553_LAZ_PL1.laz
├── E283N1548_LAZ_PL1.laz
├── E283N1549_LAZ_PL1.laz
├── E283N1550_LAZ_PL1.laz
├── E283N1551_LAZ_PL1.laz
├── E283N1552_LAZ_PL1.laz
├── E283N1553_LAZ_PL1.laz
├── E284N1548_LAZ_PL1.laz
├── E284N1549_LAZ_PL1.laz
├── E284N1550_LAZ_PL1.laz
├── E284N1551_LAZ_PL1.laz
├── E284N1552_LAZ_PL1.laz
├── E284N1553_LAZ_PL1.laz
├── E285N1548_LAZ_PL1.laz
├── E285N1549_LAZ_PL1.laz
├── E285N1550_LAZ_PL1.laz
├── E285N1551_LAZ_PL1.laz
├── E285N1552_LAZ_PL1.laz
├── E285N1553_LAZ_PL1.laz
├── E285N1554_LAZ_PL1.laz
└── E286N1551_LAZ_PL1.laz


LiPAD download portal 

LiPAD – TAAL VOLCANO


Alternativ, se pot folosi date de pe OpenTopography, ca această porțiune din Yosemite Valley pe care am folosit-o în altă postare. Trebuie avut în vedere că dacă setul de date este foarte mare, ar trebui împărțit în tile-uri înainte de a lucra cu el. De exemplu, pentru Yosemite am folosit:
pdal tile processed_files/yosemite_merged.laz "tiles/yose_#.laz"Creăm un director de lucru, phili și un subdirector numit raw_data, apoi mutăm în el toate datele de tip point cloud descărcate.
# go home, create subdirectory and parent directory
cd && mkdir -pv phili/raw_dataInstalează PDAL
Poți citi postarea aceasta pentru a afla cum se instalează PDAL. De fiecare dată când vrei să accesezi environment-ul unde a fost instalat PDAL, folosește conda activate urmat de numele environment-ului, în cazul nostru new_clouds.
Mă voi referi la Linux, dar și comenzile pentru Windows vor mai fi menționate. NOTĂ: comenzile PDAL, exceptând procesarea repetată, sunt la fel în Windows și Linux, dar separatorul de linii diferă: ^ în Windows și \ în Linux.
Joaca
Tipărirea primului punct (src)
# List the LAZ files
cd ~/phili
ls -lah raw_data
# Query the las data using pdal info
pdal info raw_data/E280N1553_LAZ_PL1.laz -p 0(new_clouds) myuser@comp:~/phili$ pdal info raw_data/E280N1553_LAZ_PL1.laz -p 0
{
"filename": "raw_data/E280N1553_LAZ_PL1.laz",
"pdal_version": "2.0.1 (git-version: 6600e6)",
"points":
{
"point":
{
"Classification": 1,
"EdgeOfFlightLine": 0,
"GpsTime": 270635.4339,
"Intensity": 15,
"NumberOfReturns": 1,
"PointId": 0,
"PointSourceId": 1010,
"ReturnNumber": 1,
"ScanAngleRank": -26,
"ScanDirectionFlag": 0,
"UserData": 0,
"X": 280999.99,
"Y": 1552622.08,
"Z": 260.8
}
}
}Tipărirea metadatelor fișierului (src)
pdal info raw_data/E280N1553_LAZ_PL1.laz --metadata(new_clouds) myuser@comp:~/phili$ pdal info raw_data/E280N1553_LAZ_PL1.laz --metadata
{
"filename": "raw_data/E280N1553_LAZ_PL1.laz",
"metadata":
{
"comp_spatialreference": "",
"compressed": true,
"count": 902276,
"creation_doy": 46,
"creation_year": 2016,
"dataformat_id": 1,
"dataoffset": 329,
"filesource_id": 0,
"global_encoding": 0,
"global_encoding_base64": "AAA=",
"header_size": 227,
"major_version": 1,
"maxx": 280999.99,
"maxy": 1552669.86,
"maxz": 262.28,
"minor_version": 2,
"minx": 280427.5,
"miny": 1552000,
"minz": 46.3,
"offset_x": 0,
"offset_y": 0,
"offset_z": 0,
"point_length": 28,
"project_id": "00000000-0000-0000-0000-000000000000",
"scale_x": 0.01,
"scale_y": 0.01,
"scale_z": 0.01,
"software_id": "TerraScan",
"spatialreference": "",
"srs":
{
"compoundwkt": "",
"horizontal": "",
"isgeocentric": false,
"isgeographic": false,
"prettycompoundwkt": "",
"prettywkt": "",
"proj4": "",
"units":
{
"horizontal": "unknown",
"vertical": ""
},
"vertical": "",
"wkt": ""
},
"system_id": "",
"vlr_0":
{
"data": "AgAAAAICAAAAAAAAUMMAAP////////////////////8CAAYAFAACAAcACAACAA==",
"description": "by laszip of LAStools (150202)",
"record_id": 22204,
"user_id": "laszip encoded"
}
},
"pdal_version": "2.0.1 (git-version: 6600e6)"
}Instalează jq cu sudo apt install jq (pe Windows de pe https://stedolan.github.io/jq), apoi filtrează răspunsul de tip JSON al interogării folosind jq.
(new_clouds) myuser@comp:~/phili$ pdal info raw_data/E280N1553_LAZ_PL1.laz --metadata | jq ".metadata.maxx, .metadata.count"
280999.99
902276Găsește centroidul cubului înprejmuitor (src)
(new_clouds) myuser@comp:~/phili$ pdal info raw_data/E280N1553_LAZ_PL1.laz --all | jq .stats.bbox.native.bbox
{
"maxx": 280999.99,
"maxy": 1552669.86,
"maxz": 262.28,
"minx": 280427.5,
"miny": 1552000,
"minz": 46.3
}Calculează valorile medii X, Y, și Z pentru acest tile: min + (max – min)/2
- x = 280427.5 + (280999.99 – 280427.5)/2 = 280713.745
- y = 1552000 + (1552669.86 – 1552000)/2 = 1552334.930
- z = 46.3 + (262.28 – 46.3)/2 = 154.290
(new_clouds) myuser@comp:~/phili$ python
Python 3.8.1 | packaged by conda-forge | (default, Jan 29 2020, 14:55:04)
[GCC 7.3.0] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> 280427.5 + (280999.99 - 280427.5)/2
280713.745
>>> 1552000 + (1552669.86 - 1552000)/2
1552334.9300000002
>>> 46.3 + (262.28 - 46.3)/2
154.28999999999996
>>> exit()
(new_clouds) myuser@comp:~/phili$Acum putem returna trei cele mai apropiate puncte de centrul calculat.
(new_clouds) myuser@comp:~/phili$ pdal info raw_data/E280N1553_LAZ_PL1.laz --query "280713.745, 1552334.930, 154.290/3"
{
"filename": "raw_data/E280N1553_LAZ_PL1.laz",
"pdal_version": "2.0.1 (git-version: 6600e6)",
"points":
{
"point":
[
{
"Classification": 1,
"EdgeOfFlightLine": 0,
"GpsTime": 270635.4342,
"Intensity": 9,
"NumberOfReturns": 1,
"PointId": 42,
"PointSourceId": 1010,
"ReturnNumber": 1,
"ScanAngleRank": -26,
"ScanDirectionFlag": 1,
"UserData": 0,
"X": 280999.98,
"Y": 1552622.09,
"Z": 262.28
},
{
"Classification": 1,
"EdgeOfFlightLine": 0,
"GpsTime": 270635.434,
"Intensity": 16,
"NumberOfReturns": 1,
"PointId": 19,
"PointSourceId": 1010,
"ReturnNumber": 1,
"ScanAngleRank": -26,
"ScanDirectionFlag": 0,
"UserData": 0,
"X": 280999.91,
"Y": 1552622.26,
"Z": 262.15
},
{
"Classification": 1,
"EdgeOfFlightLine": 0,
"GpsTime": 270635.4341,
"Intensity": 14,
"NumberOfReturns": 1,
"PointId": 34,
"PointSourceId": 1010,
"ReturnNumber": 1,
"ScanAngleRank": -26,
"ScanDirectionFlag": 1,
"UserData": 0,
"X": 280999.89,
"Y": 1552622.3,
"Z": 262.13
}
]
}
}
(new_clouds) myuser@comp:~/phili$ Comprimare and Decomprimare (src)
Crează un nou director numit temp_data, decomprimă fișierul din LAZ în LAS folosind pdal translate, apoi compară-le mărimea.
(new_clouds) myuser@comp:~/phili$ mkdir temp_data && pdal translate raw_data/E280N1553_LAZ_PL1.laz temp_data/E280N1553_LAZ_PL1.las
(new_clouds) myuser@comp:~/phili$ ls -lah raw_data/E280N1553_LAZ_PL1.laz
-rwxrwxrwx 1 myuser myuser 3,1M feb 6 20:52 raw_data/E280N1553_LAZ_PL1.laz
(new_clouds) myuser@comp:~/phili$ ls -lah temp_data/E280N1553_LAZ_PL1.las
-rw-r--r-- 1 myuser myuser 30M feb 7 00:17 temp_data/E280N1553_LAZ_PL1.las
(new_clouds) myuser@comp:~/phili$Reproiectarea (src)
Reproiectează fișierul folosind pdal translate. Nu existau informații despre sistemul de coordonate în fișierul LAZ, a trebuit să descarc un DTM de pe website pentru a afla că este „EPSG:32651”.
pdal translate raw_data/E280N1553_LAZ_PL1.laz \
temp_data/E280N1553_LAZ_PL1_WGS.laz reprojection \
--filters.reprojection.in_srs="EPSG:32651" \
--filters.reprojection.out_srs="EPSG:4326"
pdal info temp_data/E280N1553_LAZ_PL1_WGS.laz --all | jq .stats.bbox.native.bbox
pdal info temp_data/E280N1553_LAZ_PL1_WGS.laz -p 0(new_clouds) myuser@comp:~/phili$ pdal translate raw_data/E280N1553_LAZ_PL1.laz \
> temp_data/E280N1553_LAZ_PL1_WGS.laz reprojection \
> --filters.reprojection.in_srs="EPSG:32651" \
> --filters.reprojection.out_srs="EPSG:4326"
(new_clouds) myuser@comp:~/phili$ pdal info temp_data/E280N1553_LAZ_PL1_WGS.laz --all | jq .stats.bbox.native.bbox
{
"maxx": 120.97,
"maxy": 14.04,
"maxz": 262.28,
"minx": 120.97,
"miny": 14.03,
"minz": 46.3
}
(new_clouds) myuser@comp:~/phili$ pdal info temp_data/E280N1553_LAZ_PL1_WGS.laz -p 0
{
"filename": "temp_data/E280N1553_LAZ_PL1_WGS.laz",
"pdal_version": "2.0.1 (git-version: 6600e6)",
"points":
{
"point":
{
"Blue": 0,
"Classification": 1,
"EdgeOfFlightLine": 0,
"GpsTime": 270635.4339,
"Green": 0,
"Intensity": 15,
"NumberOfReturns": 1,
"PointId": 0,
"PointSourceId": 1010,
"Red": 0,
"ReturnNumber": 1,
"ScanAngleRank": -26,
"ScanDirectionFlag": 0,
"UserData": 0,
"X": 120.97,
"Y": 14.04,
"Z": 260.8
}
}
}
(new_clouds) myuser@comp:~/phili$Pentru date de tip latitudine/longitudine, va trebui să setezi scara la valori mai mici de genul 0.0000001. Repetă comanda de reproiectare setând și scara.
pdal translate raw_data/E280N1553_LAZ_PL1.laz \
temp_data/E280N1553_LAZ_PL1_WGS.laz reprojection \
--filters.reprojection.in_srs="EPSG:32651" \
--filters.reprojection.out_srs="EPSG:4326" \
--writers.las.scale_x=0.0000001 \
--writers.las.scale_y=0.0000001 \
--writers.las.offset_x="auto" \
--writers.las.offset_y="auto"
pdal info temp_data/E280N1553_LAZ_PL1_WGS.laz --all | jq .stats.bbox.native.bbox
pdal info temp_data/E280N1553_LAZ_PL1_WGS.laz -p 0(new_clouds) myuser@comp:~/phili$ pdal translate raw_data/E280N1553_LAZ_PL1.laz \
> temp_data/E280N1553_LAZ_PL1_WGS.laz reprojection \
> --filters.reprojection.in_srs="EPSG:32651" \
> --filters.reprojection.out_srs="EPSG:4326" \
> --writers.las.scale_x=0.0000001 \
> --writers.las.scale_y=0.0000001 \
> --writers.las.offset_x="auto" \
> --writers.las.offset_y="auto"
(pdal translate writers.las Warning) Auto offset for Xrequested in stream mode. Using value of 120.972.
(pdal translate writers.las Warning) Auto offset for Yrequested in stream mode. Using value of 14.0358.
(new_clouds) myuser@comp:~/phili$ pdal info temp_data/E280N1553_LAZ_PL1_WGS.laz --all | jq .stats.bbox.native.bbox
{
"maxx": 120.9721603,
"maxy": 14.03619005,
"maxz": 262.28,
"minx": 120.9668247,
"miny": 14.03012035,
"minz": 46.3
}
(new_clouds) myuser@comp:~/phili$ pdal info temp_data/E280N1553_LAZ_PL1_WGS.laz -p 0
{
"filename": "temp_data/E280N1553_LAZ_PL1_WGS.laz",
"pdal_version": "2.0.1 (git-version: 6600e6)",
"points":
{
"point":
{
"Blue": 0,
"Classification": 1,
"EdgeOfFlightLine": 0,
"GpsTime": 270635.4339,
"Green": 0,
"Intensity": 15,
"NumberOfReturns": 1,
"PointId": 0,
"PointSourceId": 1010,
"Red": 0,
"ReturnNumber": 1,
"ScanAngleRank": -26,
"ScanDirectionFlag": 0,
"UserData": 0,
"X": 120.9721111,
"Y": 14.03576605,
"Z": 260.8
}
}
}
(new_clouds) myuser@comp:~/phili$Entwine (src)
Vom folosi Entwine pentru a crea un nou director numit ept_phili, apoi a rearanja punctele într-o structură de tip octree fără pierderi, cunoscută drept EPT.
Poți citi postarea aceasta pentru a afla cum se instalează Entwine.
Comanda build este folosită pentru a genera un set de date Entwine Point Tile (EPT) din datele de tip point cloud. Deoarece vrem să construim vizualizații din toate datele noastre, pentru input furnizăm calea către directorul raw_data către comandă.
entwine build -i raw_data/*.laz -o ept_phili --srs "EPSG:32651"(new_clouds) myuser@comp:~/phili$ entwine build -i raw_data/*.laz -o ept_phili --srs "EPSG:32651"
Scanning input
1/35: raw_data/E280N1553_LAZ_PL1.laz
2/35: raw_data/E281N1547_LAZ_PL1.laz
3/35: raw_data/E281N1548_LAZ_PL1.laz
4/35: raw_data/E281N1549_LAZ_PL1.laz
5/35: raw_data/E281N1550_LAZ_PL1.laz
6/35: raw_data/E281N1551_LAZ_PL1.laz
7/35: raw_data/E281N1552_LAZ_PL1.laz
8/35: raw_data/E281N1553_LAZ_PL1.laz
9/35: raw_data/E282N1547_LAZ_PL1.laz
10/35: raw_data/E282N1548_LAZ_PL1.laz
11/35: raw_data/E282N1549_LAZ_PL1.laz
12/35: raw_data/E282N1550_LAZ_PL1.laz
13/35: raw_data/E282N1551_LAZ_PL1.laz
14/35: raw_data/E282N1552_LAZ_PL1.laz
15/35: raw_data/E282N1553_LAZ_PL1.laz
16/35: raw_data/E283N1548_LAZ_PL1.laz
17/35: raw_data/E283N1549_LAZ_PL1.laz
18/35: raw_data/E283N1550_LAZ_PL1.laz
19/35: raw_data/E283N1551_LAZ_PL1.laz
20/35: raw_data/E283N1552_LAZ_PL1.laz
21/35: raw_data/E283N1553_LAZ_PL1.laz
22/35: raw_data/E284N1548_LAZ_PL1.laz
23/35: raw_data/E284N1549_LAZ_PL1.laz
24/35: raw_data/E284N1550_LAZ_PL1.laz
25/35: raw_data/E284N1551_LAZ_PL1.laz
26/35: raw_data/E284N1552_LAZ_PL1.laz
27/35: raw_data/E284N1553_LAZ_PL1.laz
28/35: raw_data/E285N1548_LAZ_PL1.laz
29/35: raw_data/E285N1549_LAZ_PL1.laz
30/35: raw_data/E285N1550_LAZ_PL1.laz
31/35: raw_data/E285N1551_LAZ_PL1.laz
32/35: raw_data/E285N1552_LAZ_PL1.laz
33/35: raw_data/E285N1553_LAZ_PL1.laz
34/35: raw_data/E285N1554_LAZ_PL1.laz
35/35: raw_data/E286N1551_LAZ_PL1.laz
Entwine Version: 2.1.0
EPT Version: 1.0.0
Input:
Files: 35
Total points: 172,148,957
Density estimate (per square unit): 5.43294
Threads: [3, 5]
Output:
Path: ept_phili/
Data type: laszip
Hierarchy type: json
Sleep count: 2,097,152
Scale: 0.01
Offset: (283714, 1550170, 120)
Metadata:
SRS: EPSG:32651
Bounds: [(280427, 1546340, -140), (287000, 1554000, 380)]
Cube: [(279883, 1546339, -3711), (287545, 1554001, 3951)]
Storing dimensions: [
X:int32, Y:int32, Z:int32, Intensity:uint16, ReturnNumber:uint8,
NumberOfReturns:uint8, ScanDirectionFlag:uint8,
EdgeOfFlightLine:uint8, Classification:uint8, ScanAngleRank:float,
UserData:uint8, PointSourceId:uint16, GpsTime:double, OriginId:uint32
]
Build parameters:
Span: 128
Resolution 2D: 128 * 128 = 16,384
Resolution 3D: 128 * 128 * 128 = 2,097,152
Maximum node size: 65,536
Minimum node size: 16,384
Cache size: 64
Adding 0 - raw_data/E280N1553_LAZ_PL1.laz
Adding 1 - raw_data/E281N1547_LAZ_PL1.laz
Adding 2 - raw_data/E281N1548_LAZ_PL1.laz
Adding 3 - raw_data/E281N1549_LAZ_PL1.laz
Adding 4 - raw_data/E281N1550_LAZ_PL1.laz
Done 0
Adding 5 - raw_data/E281N1551_LAZ_PL1.laz
Done 1
Adding 6 - raw_data/E281N1552_LAZ_PL1.laz
Done 2
Adding 7 - raw_data/E281N1553_LAZ_PL1.laz
00:10 - 10% - 16,730,384 - 6,022(6,022)M/h - 122W - 5R - 334A
Done 3
Adding 8 - raw_data/E282N1547_LAZ_PL1.laz
Done 4
Adding 9 - raw_data/E282N1548_LAZ_PL1.laz
00:20 - 19% - 32,115,196 - 5,780(5,538)M/h - 409W - 28R - 369A
Done 5
Adding 10 - raw_data/E282N1549_LAZ_PL1.laz
Done 8
Adding 11 - raw_data/E282N1550_LAZ_PL1.laz
Done 6
Adding 12 - raw_data/E282N1551_LAZ_PL1.laz
Done 7
Adding 13 - raw_data/E282N1552_LAZ_PL1.laz
00:30 - 26% - 45,330,267 - 5,439(4,757)M/h - 437W - 60R - 335A
Done 9
Adding 14 - raw_data/E282N1553_LAZ_PL1.laz
00:40 - 34% - 59,255,561 - 5,333(5,013)M/h - 435W - 72R - 351A
Done 10
Adding 15 - raw_data/E283N1548_LAZ_PL1.laz
Done 11
Adding 16 - raw_data/E283N1549_LAZ_PL1.laz
Done 14
Adding 17 - raw_data/E283N1550_LAZ_PL1.laz
00:50 - 43% - 73,172,066 - 5,268(5,009)M/h - 375W - 54R - 383A
Done 12
Adding 18 - raw_data/E283N1551_LAZ_PL1.laz
Done 15
Adding 19 - raw_data/E283N1552_LAZ_PL1.laz
Done 13
Adding 20 - raw_data/E283N1553_LAZ_PL1.laz
01:00 - 50% - 86,871,954 - 5,212(4,931)M/h - 519W - 64R - 267A
Done 17
Adding 21 - raw_data/E284N1548_LAZ_PL1.laz
Done 16
Adding 22 - raw_data/E284N1549_LAZ_PL1.laz
01:10 - 59% - 101,289,352 - 5,209(5,190)M/h - 395W - 41R - 286A
Done 18
Adding 23 - raw_data/E284N1550_LAZ_PL1.laz
Done 21
Adding 24 - raw_data/E284N1551_LAZ_PL1.laz
Done 20
Adding 25 - raw_data/E284N1552_LAZ_PL1.laz
Done 19
Adding 26 - raw_data/E284N1553_LAZ_PL1.laz
01:20 - 67% - 115,187,943 - 5,183(5,003)M/h - 448W - 71R - 265A
Done 23
Adding 27 - raw_data/E285N1548_LAZ_PL1.laz
Done 22
Adding 28 - raw_data/E285N1549_LAZ_PL1.laz
01:30 - 75% - 129,260,740 - 5,170(5,066)M/h - 489W - 69R - 245A
Done 24
Adding 29 - raw_data/E285N1550_LAZ_PL1.laz
Done 27
Adding 30 - raw_data/E285N1551_LAZ_PL1.laz
Done 26
Adding 31 - raw_data/E285N1552_LAZ_PL1.laz
01:40 - 84% - 143,799,941 - 5,176(5,234)M/h - 356W - 68R - 335A
Done 28
Adding 32 - raw_data/E285N1553_LAZ_PL1.laz
Done 25
Adding 33 - raw_data/E285N1554_LAZ_PL1.laz
Done 29
Adding 34 - raw_data/E286N1551_LAZ_PL1.laz
01:50 - 92% - 157,579,245 - 5,157(4,960)M/h - 454W - 58R - 310A
Done 30
Pushes complete - joining...
Done 31
02:00 - 99% - 170,642,287 - 5,119(4,702)M/h - 437W - 71R - 237A
Done 34
Done 32
Done 33
Reawakened: 661
Saving registry...
Saving metadata...
Index completed in 02:04.
Save complete.
Points inserted: 172,148,957
(new_clouds) myuser@comp:~/phili$(new_clouds) myuser@comp:~/phili$ tree ept_phili/
ept_phili/
├── ept-build.json
├── ept-data
│ ├── 0-0-0-0.laz
│ ├── 1-0-0-0.laz
│ ├── 1-0-0-1.laz
│ ├── 1-0-1-0.laz
│ ├── 1-0-1-1.laz
│ ├── 1-1-0-0.laz
[...]
│ ├── 7-99-70-63.laz
│ ├── 7-99-71-63.laz
│ ├── 7-99-72-63.laz
│ └── 7-99-75-63.laz
├── ept-hierarchy
│ └── 0-0-0-0.json
├── ept.json
└── ept-sources
├── 0.json
└── list.json
3 directories, 4489 files
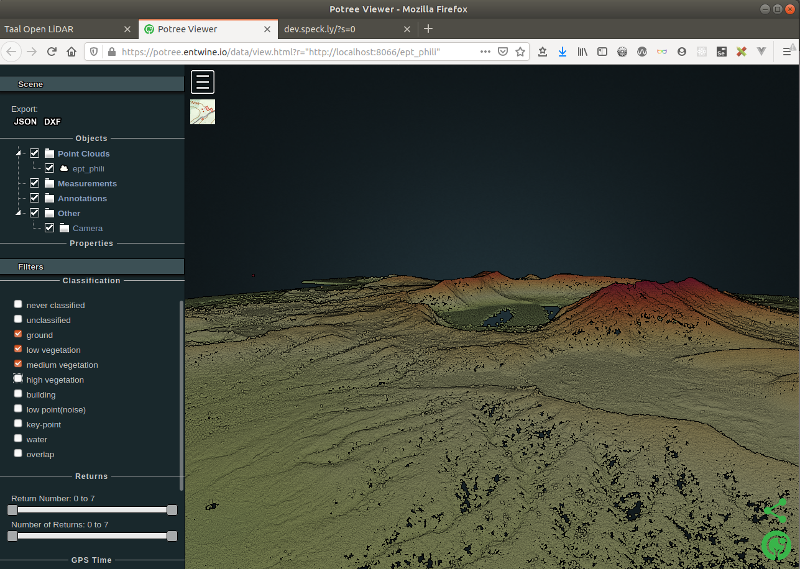
(new_clouds) myuser@comp:~/phili$Acum putem servi static directorul entwine cu un server HTTP și să-l vizualizăm în proiectele Potree și Plasio, ce sunt bazate pe WebGL.
Potree and Plasio
Putem vizualiza datele noastre în Potree și Plasio, direct în browser.
# Install NodeJS and http server from nodejs
conda install nodejs -y
npm install http-server -g
# Make sure you are in the working folder, and the EPT folder
# is a subfolder
# Start the server using --cors to allow serving data to the
# remote Potree/Plasio pages
http-server -p 8066 --cors(new_clouds) myuser@comp:~/phili$ http-server -p 8066 --cors
Starting up http-server, serving ./
Available on:
http://127.0.0.1:8066
http://192.168.0.102:8066
http://172.18.0.1:8066
http://192.168.61.1:8066
http://192.168.63.1:8066
Hit CTRL-C to stop the server# Visualise out local point cloud data in Potree
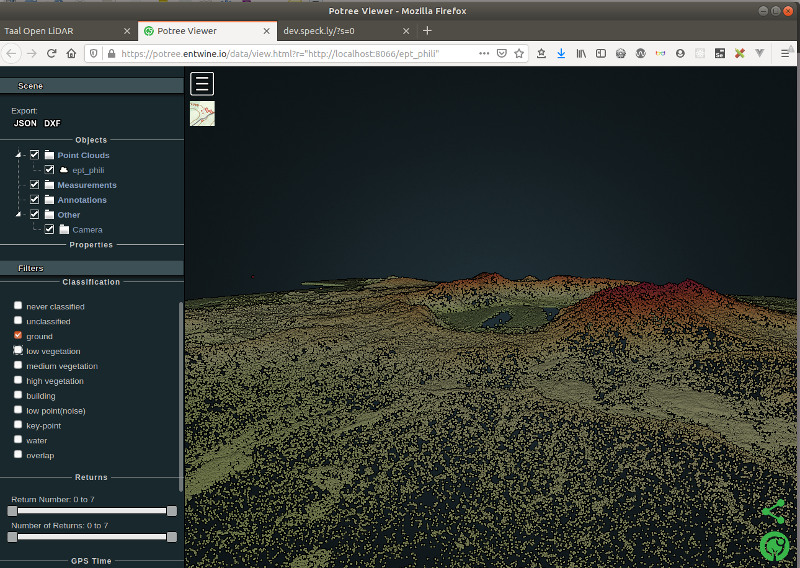
xdg-open "http://potree.entwine.io/data/view.html?r=http://localhost:8066/ept_phili"Atribuie o scară de culori punctelor pe baza elevației, clasificării și altor criterii, apoi joacă-te cu câteva profile de teren.


First view 

color by elevation 

zoom 

zoom 
profile highlight 

profile inside 

profile highlight 
profile inside 
profile highlight 

profile inside 

profile outside 
potree about












Vizualizează punctele în funcție de altitudine:

BY ELEVATION 

hide high vegetation 
hide medium vegetation 
hide low vegetation 

BY ELEVATION 
hide high vegetation 

hide medium vegetation 
hide low vegetation






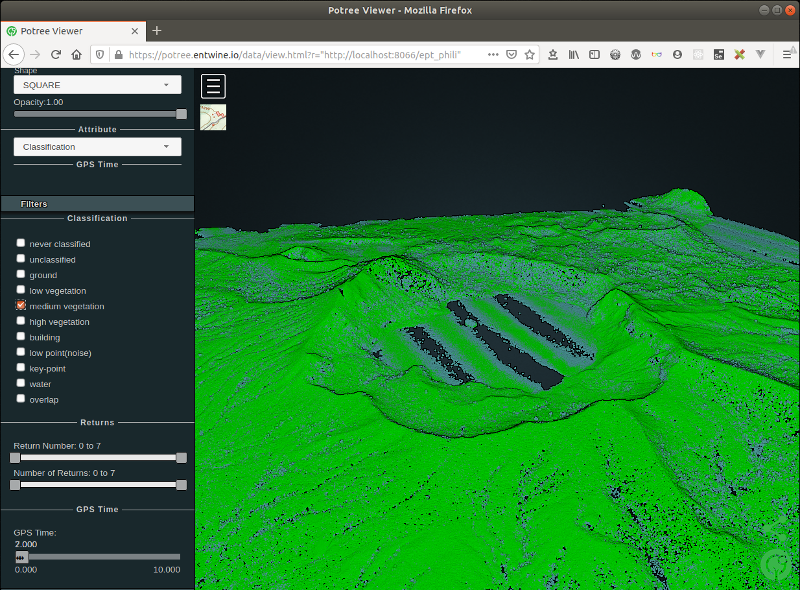
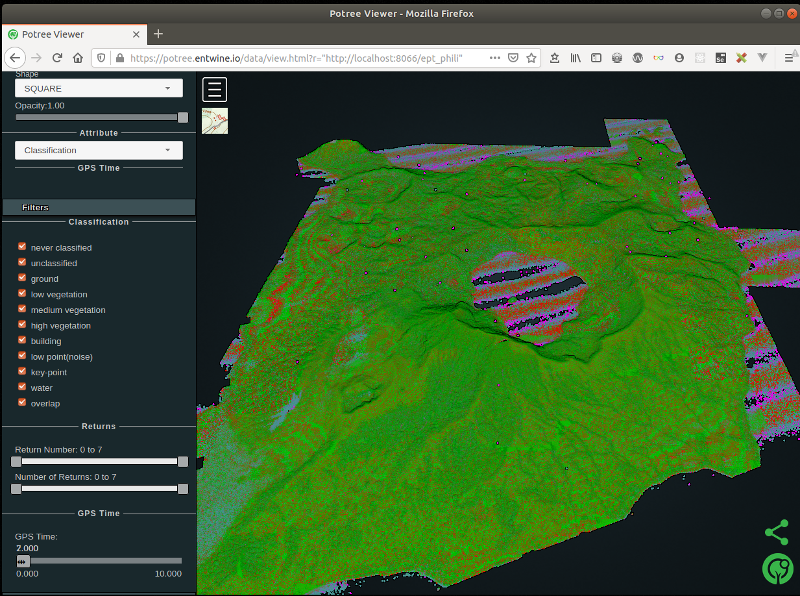
Vizualizează punctele în funcție de clasificare:


ground 
medium vegetation 

high vegetation 

noise 

key point 
All 

all 

all – trees






Vizualizează punctele și în Plasio.
# Visualise our local point cloud data in Plasio
xdg-open "http://dev.speck.ly/?s=0&r=ept://localhost:8066/ept_phili&c0s=local://color"

First view 

color by elevation 
satellite imagery 
plasio about




Găsirea limitelor (src)
Crează un fișier JSON numit entwine.json, ce conține codul de mai jos, apoi convertește din EPT în LAZ folosind comanda pdal pipeline.
{
"pipeline": [
{
"type": "readers.ept",
"filename":"ept_phili",
"resolution": 5
},
{
"type": "writers.las",
"compression": "true",
"minor_version": "2",
"dataformat_id": "0",
"filename":"temp_data/ept_phili_to_laz.laz"
}
]
}pdal pipeline entwine.json -v 7
pdal info temp_data/ept_phili_to_laz.laz | jq .stats.bbox.native.bbox
pdal info temp_data/ept_phili_to_laz.laz -p 0(new_clouds) myuser@comp:~/phili$ pdal pipeline entwine.json -v 7
(PDAL Debug) Debugging...
(pdal pipeline readers.ept Debug) Endpoint: ept_phili/
Got EPT info
SRS: PROJCS["WGS 84 / UTM zone 51N",
GEOGCS["WGS 84",
DATUM["WGS_1984",
SPHEROID["WGS 84",6378137,298.257223563,
AUTHORITY["EPSG","7030"]],
AUTHORITY["EPSG","6326"]],
PRIMEM["Greenwich",0,
AUTHORITY["EPSG","8901"]],
UNIT["degree",0.0174532925199433,
AUTHORITY["EPSG","9122"]],
AUTHORITY["EPSG","4326"]],
PROJECTION["Transverse_Mercator"],
PARAMETER["latitude_of_origin",0],
PARAMETER["central_meridian",123],
PARAMETER["scale_factor",0.9996],
PARAMETER["false_easting",500000],
PARAMETER["false_northing",0],
UNIT["metre",1,
AUTHORITY["EPSG","9001"]],
AXIS["Easting",EAST],
AXIS["Northing",NORTH],
AUTHORITY["EPSG","32651"]]
Root resolution: 59.8594
Query resolution: 5
Actual resolution: 3.74121
Depth end: 5
Query bounds: ([-1.797693134862316e+308, 1.797693134862316e+308], [-1.797693134862316e+308, 1.797693134862316e+308], [-1.797693134862316e+308, 1.797693134862316e+308])
Threads: 4
(pdal pipeline readers.ept Debug) Registering dim X: double
(pdal pipeline readers.ept Debug) Registering dim Y: double
(pdal pipeline readers.ept Debug) Registering dim Z: double
(pdal pipeline readers.ept Debug) Registering dim Intensity: uint16_t
(pdal pipeline readers.ept Debug) Registering dim ReturnNumber: uint8_t
(pdal pipeline readers.ept Debug) Registering dim NumberOfReturns: uint8_t
(pdal pipeline readers.ept Debug) Registering dim ScanDirectionFlag: uint8_t
(pdal pipeline readers.ept Debug) Registering dim EdgeOfFlightLine: uint8_t
(pdal pipeline readers.ept Debug) Registering dim Classification: uint8_t
(pdal pipeline readers.ept Debug) Registering dim ScanAngleRank: float
(pdal pipeline readers.ept Debug) Registering dim UserData: uint8_t
(pdal pipeline readers.ept Debug) Registering dim PointSourceId: uint16_t
(pdal pipeline readers.ept Debug) Registering dim GpsTime: double
(pdal pipeline readers.ept Debug) Registering dim OriginId: uint32_t
(pdal pipeline Debug) Executing pipeline in stream mode.
(pdal pipeline readers.ept Debug) Overlap nodes: 309
(pdal pipeline readers.ept Debug) Overlap points: 8215660
(pdal pipeline readers.ept Debug) Streaming Data 1/309: 0-0-0-0
(pdal pipeline readers.ept Debug) Points : 12614
[...]
(pdal pipeline readers.ept Debug) Streaming Data 309/309: 4-14-9-7
(pdal pipeline readers.ept Debug) Points : 56730
(pdal pipeline writers.las Debug) Wrote 8215660 points to the LAS file
(new_clouds) myuser@comp:~/phili$ pdal info temp_data/ept_phili_to_laz.laz | jq .stats.bbox.native.bbox
{
"maxx": 286999.99,
"maxy": 1553999.99,
"maxz": 379.23,
"minx": 280427.84,
"miny": 1546340.11,
"minz": -139.2
}
(new_clouds) myuser@comp:~/phili$ pdal info temp_data/ept_phili_to_laz.laz -p 0
{
"filename": "temp_data/ept_phili_to_laz.laz",
"pdal_version": "2.0.1 (git-version: 6600e6)",
"points":
{
"point":
{
"Classification": 14,
"EdgeOfFlightLine": 1,
"Intensity": 1,
"NumberOfReturns": 1,
"PointId": 0,
"PointSourceId": 1010,
"ReturnNumber": 1,
"ScanAngleRank": 14,
"ScanDirectionFlag": 0,
"UserData": 0,
"X": 285540.57,
"Y": 1553975.03,
"Z": 49.87
}
}
}
(new_clouds) myuser@comp:~/phili$Găsește marginile unui poligon de încadrare cât mai apropiat de puncte sub formă de WKT sau JSON.
pdal info temp_data/ept_phili_to_laz.laz --boundary(new_clouds) myuser@comp:~/phili$ pdal info temp_data/ept_phili_to_laz.laz --boundary
{
"boundary":
{
"area": 72703609.64,
"avg_pt_per_sq_unit": 28.76052946,
"avg_pt_spacing": 2.974793047,
"boundary": "POLYGON ((284777.03 1544717.6,287831.19 1547362.6,287067.65 1556620.0,277905.18 1551330.1,280959.33 1546040.1,284777.03 1544717.6))",
"boundary_json": { "type": "Polygon", "coordinates": [ [ [ 284777.030648400017526, 1544717.607343849958852 ], [ 287831.188054799975362, 1547362.585245609981939 ], [ 287067.648703199985903, 1556620.007901760051027 ], [ 277905.17648399999598, 1551330.052098240004852 ], [ 280959.333890400012024, 1546040.096294729970396 ], [ 284777.030648400017526, 1544717.607343849958852 ] ] ] },
"density": 0.1130020922,
"edge_length": 0,
"estimated_edge": 2644.977902,
"hex_offsets": "MULTIPOINT (0 0, -763.539 1322.49, 0 2644.98, 1527.08 2644.98, 2290.62 1322.49, 1527.08 0)",
"sample_size": 5000,
"threshold": 15
},
"filename": "temp_data/ept_phili_to_laz.laz",
"pdal_version": "2.0.1 (git-version: 6600e6)"
}
(new_clouds) myuser@comp:~/phili$Obține un fișier ce conține geometrii de tip vector folosind pdal tindex, comanda “tile index”. Apoi vizualizează fișierul în QGIS.
# simple tindex
pdal tindex create --tindex temp_data/boundary.sqlite \
--filespec temp_data/ept_phili_to_laz.laz \
--t_srs "EPSG:32651" \
-f SQLite
# set edge size for output
pdal tindex create --tindex temp_data/boundary.sqlite \
--filespec temp_data/ept_phili_to_laz.laz \
--filters.hexbin.edge_size=10 \
--filters.hexbin.threshold=1 \
--t_srs "EPSG:32651" \
-f SQLite(new_clouds) myuser@comp:~/phili$ tree temp_data/
temp_data/
├── boundary.sqlite
├── E280N1553_LAZ_PL1.las
├── E280N1553_LAZ_PL1_WGS.laz
└── ept_phili_to_laz.laz
0 directories, 4 files
(new_clouds) myuser@comp:~/phili$

qgis tindex boundary 
fine boundary


Sau folosește Hexbin să extragi limita punctelor propriu-zise, nu doar extinderea rectangulară. Crează un fișier numit hexbin-pipeline.json și populează-l cu codul de mai jos, apoi rulează pdal pipeline.
[
"temp_data/ept_phili_to_laz.laz",
{
"type" : "filters.hexbin"
}
]pdal pipeline hexbin-pipeline.json --metadata hexbin-out.json
pdal info --boundary temp_data/ept_phili_to_laz.laz(new_clouds) myuser@comp:~/phili$ tree -L 1
.
├── entwine.json
├── ept_phili
├── hexbin-out.json
├── hexbin-pipeline.json
├── raw_data
└── temp_data
3 directories, 3 files
(new_clouds) myuser@comp:~/phili$ pdal info --boundary temp_data/ept_phili_to_laz.laz
{
"boundary":
{
"area": 72703609.64,
"avg_pt_per_sq_unit": 28.76052946,
"avg_pt_spacing": 2.974793047,
"boundary": "POLYGON ((284777.03 1544717.6,287831.19 1547362.6,287067.65 1556620.0,277905.18 1551330.1,280959.33 1546040.1,284777.03 1544717.6))",
"boundary_json": { "type": "Polygon", "coordinates": [ [ [ 284777.030648400017526, 1544717.607343849958852 ], [ 287831.188054799975362, 1547362.585245609981939 ], [ 287067.648703199985903, 1556620.007901760051027 ], [ 277905.17648399999598, 1551330.052098240004852 ], [ 280959.333890400012024, 1546040.096294729970396 ], [ 284777.030648400017526, 1544717.607343849958852 ] ] ] },
"density": 0.1130020922,
"edge_length": 0,
"estimated_edge": 2644.977902,
"hex_offsets": "MULTIPOINT (0 0, -763.539 1322.49, 0 2644.98, 1527.08 2644.98, 2290.62 1322.49, 1527.08 0)",
"sample_size": 5000,
"threshold": 15
},
"filename": "temp_data/ept_phili_to_laz.laz",
"pdal_version": "2.0.1 (git-version: 6600e6)"
}
(new_clouds) myuser@comp:~/phili$Decuparea
pdal translate -i temp_data/ept_phili_to_laz.laz \
-o temp_data/ept_phili_cropped.laz \
--readers.las.spatialreference="EPSG:32651" -f crop \
--filters.crop.polygon="MultiPolygon (((282066.8520627228426747 1550772.96420694049447775, 283228.65732152480632067 1551561.3320611275266856, 284763.89998494170140475 1551167.14813403389416635, 284826.13955237751360983 1550088.32896514632739127, 284348.96953536954242736 1548947.27022882294841111, 282813.72687195264734328 1548885.03066138713620603, 282046.10554024419980124 1549279.21458848076872528, 281651.92161315068369731 1550150.56853258213959634, 282066.8520627228426747 1550772.96420694049447775)))"
pdal info temp_data/ept_phili_cropped.laz --boundary(new_clouds) myuser@comp:~/phili$ pdal translate -i temp_data/ept_phili_to_laz.laz \
> -o temp_data/ept_phili_cropped.laz \
> --readers.las.spatialreference="EPSG:32651" -f crop \
> --filters.crop.polygon="MultiPolygon (((282066.8520627228426747 1550772.96420694049447775, 283228.65732152480632067 1551561.3320611275266856, 284763.89998494170140475 1551167.14813403389416635, 284826.13955237751360983 1550088.32896514632739127, 284348.96953536954242736 1548947.27022882294841111, 282813.72687195264734328 1548885.03066138713620603, 282046.10554024419980124 1549279.21458848076872528, 281651.92161315068369731 1550150.56853258213959634, 282066.8520627228426747 1550772.96420694049447775)))"
(new_clouds) myuser@comp:~/phili$ pdal info temp_data/ept_phili_cropped.laz --boundary
{
"boundary":
{
"area": 28815222.78,
"avg_pt_per_sq_unit": 49.58609362,
"avg_pt_spacing": 4.065550131,
"boundary": "POLYGON ((284719.02 1547140.9,287236.5 1551501.3,283460.28 1553681.5,280942.8 1549321.1,284719.02 1547140.9))",
"boundary_json": { "type": "Polygon", "coordinates": [ [ [ 284719.019983169971965, 1547140.906790179898962 ], [ 287236.499949509976432, 1551501.310000000055879 ], [ 283460.28000000002794, 1553681.511604910017923 ], [ 280942.800033660023473, 1549321.108395090093836 ], [ 284719.019983169971965, 1547140.906790179898962 ] ] ] },
"density": 0.06050083365,
"edge_length": 0,
"estimated_edge": 2180.201605,
"hex_offsets": "MULTIPOINT (0 0, -629.37 1090.1, 0 2180.2, 1258.74 2180.2, 1888.11 1090.1, 1258.74 0)",
"sample_size": 5000,
"threshold": 15
},
"filename": "temp_data/ept_phili_cropped.laz",
"pdal_version": "2.0.1 (git-version: 6600e6)"
}
(new_clouds) myuser@comp:~/phili$Extragerea datelor cu poligoane (src)
{
"pipeline": [
"temp_data/ept_phili_to_laz.laz",
{
"column": "CLS",
"datasource": "clipper.geojson",
"dimension": "Classification",
"type": "filters.overlay"
},
{
"limits": "Classification[6:6]",
"type": "filters.range"
},
"temp_data/ept_phili_clipped.laz"
]
}pdal pipeline clipping.json --nostreamColorarea punctelor cu imagini (src)
TODO
Înlăturarea zgomotului (src)
Folosește PDAL să înlături zgomotul nedorit. Crează un fișier numit denoise.json și populează-l cu codul următor, apoi rulează pdal pipeline.
{
"pipeline": [
"temp_data/ept_phili_to_laz.laz",
{
"type": "filters.outlier",
"method": "statistical",
"multiplier": 3,
"mean_k": 8
},
{
"type": "filters.range",
"limits": "Classification![7:7],Z[-100:3000]"
},
{
"type": "writers.las",
"compression": "true",
"minor_version": "2",
"dataformat_id": "0",
"filename":"temp_data/clean.laz"
}
]
}pdal pipeline denoise.json(new_clouds) myuser@comp:~/phili$ pdal pipeline denoise.json
(new_clouds) myuser@comp:~/phili$ tree temp_data/
temp_data/
├── boundary.sqlite
├── clean.laz
├── E280N1553_LAZ_PL1.las
├── E280N1553_LAZ_PL1_WGS.laz
└── ept_phili_to_laz.laz
0 directories, 5 files
(new_clouds) myuser@comp:~/phili$ pdal info --boundary temp_data/clean.laz
{
"boundary":
{
"area": 81355357.53,
"avg_pt_per_sq_unit": 29.95675523,
"avg_pt_spacing": 3.159997638,
"boundary": "POLYGON ((284609.97 1544906.0,289844.42 1548791.5,286853.31 1556562.7,277879.96 1551381.9,280871.08 1546201.2,284609.97 1544906.0))",
"boundary_json": { "type": "Polygon", "coordinates": [ [ [ 284609.971245159977116, 1544905.9744242799934 ], [ 289844.422529059986118, 1548791.546813880093396 ], [ 286853.307509689999279, 1556562.691593060037121 ], [ 277879.962451570027042, 1551381.928406940074638 ], [ 280871.077470940013882, 1546201.165220810100436 ], [ 284609.971245159977116, 1544905.9744242799934 ] ] ] },
"density": 0.1001443574,
"edge_length": 0,
"estimated_edge": 2590.381593,
"hex_offsets": "MULTIPOINT (0 0, -747.779 1295.19, 0 2590.38, 1495.56 2590.38, 2243.34 1295.19, 1495.56 0)",
"sample_size": 5000,
"threshold": 15
},
"filename": "temp_data/clean.laz",
"pdal_version": "2.0.1 (git-version: 6600e6)"
}Vizualizarea densității achiziției (src)
Generează o suprafață ce reprezintă densitatea pentru a face un rezumat al calității achiziției, și vizualizeaz-o în QGIS, aplicând o rampă de culoare de tip gradient și folosind atributul count.
pdal density temp_data/ept_phili_to_laz.laz \
-o temp_data/density.sqlite \
--threshold=1
-f SQLite

Acquisition density

Rărirea (src)
Subeșantionează sau rărește datele de tip point cloud, pentru a accelera procesarea (mai puține date), sau pentru a ușura vizualizarea.
pdal translate temp_data/ept_phili_to_laz.laz \
temp_data/thin.laz \
sample --filters.sample.radius=20(new_clouds) myuser@comp:~/phili$ pdal translate temp_data/ept_phili_to_laz.laz \
> temp_data/thin.laz \
> sample --filters.sample.radius=20
(new_clouds) myuser@comp:~/phili$ tree temp_data/
temp_data/
├── boundary.sqlite
├── clean.laz
├── density.sqlite
├── E280N1553_LAZ_PL1.las
├── E280N1553_LAZ_PL1_WGS.laz
├── ept_phili_to_laz.laz
└── thin.laz
0 directories, 7 files
(new_clouds) myuser@comp:~/phili$Identificarea terenului (src)
Poți clasifica răspunsurile de la nivelul terenului folosind tehnica Filtrului Morfologic Simplu (Simple Morphological Filter/SMRF).
pdal translate temp_data/ept_phili_to_laz.laz \
-o temp_data/ground.laz \
smrf \
-v 4Pentru a obține o reprezentare mai precisă a răspunsurilor de la pământ, se pot înlătura datele care nu reprezintă terenul pentru a vedea doar datele de la nivelul terenului, apoi se poate folosi comanda translate pentru a grupa filters.outlier și filters.smrf.
pdal translate \
temp_data/ept_phili_to_laz.laz \
-o temp_data/ground.laz \
smrf range \
--filters.range.limits="Classification[2:2]" \
-v 4Să rulăm doar următoarea comandă, pentru a economisi timp, de obicei acest proces durează mai mult.
pdal translate temp_data/ept_phili_to_laz.laz \
-o temp_data/denoised_ground.laz \
outlier smrf range \
--filters.outlier.method="statistical" \
--filters.outlier.mean_k=8 --filters.outlier.multiplier=3.0 \
--filters.smrf.ignore="Classification[7:7]" \
--filters.range.limits="Classification[2:2]" \
--writers.las.compression=true \
--verbose 4(new_clouds) myuser@comp:~/phili$ pdal translate temp_data/ept_phili_to_laz.laz \
> -o temp_data/denoised_ground.laz \
> outlier smrf range \
> --filters.outlier.method="statistical" \
> --filters.outlier.mean_k=8 --filters.outlier.multiplier=3.0 \
> --filters.smrf.ignore="Classification[7:7]" \
> --filters.range.limits="Classification[2:2]" \
> --writers.las.compression=true \
> --verbose 4
(PDAL Debug) Debugging...
(pdal translate Debug) Executing pipeline in standard mode.
(pdal translate filters.smrf Debug) progressiveFilter: radius = 1 50115212 ground 141946 non-ground (0.28%)
(pdal translate filters.smrf Debug) progressiveFilter: radius = 1 41616570 ground 8640588 non-ground (17.19%)
(pdal translate filters.smrf Debug) progressiveFilter: radius = 2 37966057 ground 12291101 non-ground (24.46%)
(pdal translate filters.smrf Debug) progressiveFilter: radius = 3 35656784 ground 14600374 non-ground (29.05%)
(pdal translate filters.smrf Debug) progressiveFilter: radius = 4 34547497 ground 15709661 non-ground (31.26%)
(pdal translate filters.smrf Debug) progressiveFilter: radius = 5 34005642 ground 16251516 non-ground (32.34%)
(pdal translate filters.smrf Debug) progressiveFilter: radius = 6 33701727 ground 16555431 non-ground (32.94%)
(pdal translate filters.smrf Debug) progressiveFilter: radius = 7 33509838 ground 16747320 non-ground (33.32%)
(pdal translate filters.smrf Debug) progressiveFilter: radius = 8 33374281 ground 16882877 non-ground (33.59%)
(pdal translate filters.smrf Debug) progressiveFilter: radius = 9 33279882 ground 16977276 non-ground (33.78%)
(pdal translate filters.smrf Debug) progressiveFilter: radius = 10 33212965 ground 17044193 non-ground (33.91%)
(pdal translate filters.smrf Debug) progressiveFilter: radius = 11 33162742 ground 17094416 non-ground (34.01%)
(pdal translate filters.smrf Debug) progressiveFilter: radius = 12 33128547 ground 17128611 non-ground (34.08%)
(pdal translate filters.smrf Debug) progressiveFilter: radius = 13 33105320 ground 17151838 non-ground (34.13%)
(pdal translate filters.smrf Debug) progressiveFilter: radius = 14 33089489 ground 17167669 non-ground (34.16%)
(pdal translate filters.smrf Debug) progressiveFilter: radius = 15 33080329 ground 17176829 non-ground (34.18%)
(pdal translate filters.smrf Debug) progressiveFilter: radius = 16 33074261 ground 17182897 non-ground (34.19%)
(pdal translate filters.smrf Debug) progressiveFilter: radius = 17 33070615 ground 17186543 non-ground (34.20%)
(pdal translate filters.smrf Debug) progressiveFilter: radius = 18 33068555 ground 17188603 non-ground (34.20%)
(pdal translate writers.las Debug) Wrote 3776158 points to the LAS file
(new_clouds) myuser@comp:~/phili$Generarea unui DTM (src)
Generează suprafața unui model de elevație folosind rezultatul de mai sus. Crează un fișier numit dtm.json și populează-l cu codul de mai jos, apoi rulează pdal pipeline.
{
"pipeline": [
"temp_data/denoised_ground.laz",
{
"filename":"temp_data/dtm.tif",
"gdaldriver":"GTiff",
"output_type":"all",
"resolution":"2.0",
"type": "writers.gdal"
}
]
}pdal pipeline dtm.json(new_clouds) myuser@comp:~/phili$ pdal pipeline dtm.json
(new_clouds) myuser@comp:~/phili$ tree temp_data/
temp_data/
├── boundary.sqlite
├── clean.laz
├── denoised_ground.laz
├── density.sqlite
├── dtm.tif
├── E280N1553_LAZ_PL1.las
├── E280N1553_LAZ_PL1_WGS.laz
├── ept_phili_to_laz.laz
├── ground.laz
└── thin.laz
0 directories, 10 files
(new_clouds) myuser@comp:~/phili$
DTM

Generează un Hillshade din DTM (Digital Terrain Model).
gdaldem hillshade temp_data/dtm.tif \
temp_data/hillshade.tif \
-z 1.0 -s 1.0 -az 315.0 -alt 45.0 \
-of GTiff(new_clouds) myuser@comp:~/phili$ gdaldem hillshade temp_data/dtm.tif \
> temp_data/hillshade.tif \
> -z 1.0 -s 1.0 -az 315.0 -alt 45.0 \
> -of GTiff
0...10...20...30...40...50...60...70...80...90...100 - done.
(new_clouds) myuser@comp:~/phili$ tree temp_data/
temp_data/
├── boundary.sqlite
├── clean.laz
├── denoised_ground.laz
├── density.sqlite
├── dtm.tif
├── E280N1553_LAZ_PL1.las
├── E280N1553_LAZ_PL1_WGS.laz
├── ept_phili_to_laz.laz
├── ground.laz
├── hillshade.tif
└── thin.laz
0 directories, 11 files
(new_clouds) myuser@comp:~/phili$
hillshade

Crearea rețelelor de suprafață (src)
TODO
Rasterizarea Atributelor (src)
Generează o suprafață raster folosind un point cloud complet clasificat. Crează un fișier numit classification.json și populează-l cu codul de mai jos, apoi rulează pdal pipeline.
{
"pipeline":[
{
"type":"readers.ept",
"filename":"ept_phili",
"resolution": 5
},
{
"type":"writers.gdal",
"filename":"temp_data/phili-classification.tif",
"dimension":"Classification",
"data_type":"uint16_t",
"output_type":"mean",
"resolution": 5
}
]
}pdal pipeline classification.json -v 3(new_clouds) myuser@comp:~/phili$ pdal pipeline classification.json -v 3
(PDAL Debug) Debugging...
(pdal pipeline readers.ept Debug) Endpoint: ept_phili/
Got EPT info
SRS: PROJCS["WGS 84 / UTM zone 51N",
GEOGCS["WGS 84",
DATUM["WGS_1984",
SPHEROID["WGS 84",6378137,298.257223563,
AUTHORITY["EPSG","7030"]],
AUTHORITY["EPSG","6326"]],
PRIMEM["Greenwich",0,
AUTHORITY["EPSG","8901"]],
UNIT["degree",0.0174532925199433,
AUTHORITY["EPSG","9122"]],
AUTHORITY["EPSG","4326"]],
PROJECTION["Transverse_Mercator"],
PARAMETER["latitude_of_origin",0],
PARAMETER["central_meridian",123],
PARAMETER["scale_factor",0.9996],
PARAMETER["false_easting",500000],
PARAMETER["false_northing",0],
UNIT["metre",1,
AUTHORITY["EPSG","9001"]],
AXIS["Easting",EAST],
AXIS["Northing",NORTH],
AUTHORITY["EPSG","32651"]]
Root resolution: 59.8594
Query resolution: 5
Actual resolution: 3.74121
Depth end: 5
Query bounds: ([-1.797693134862316e+308, 1.797693134862316e+308], [-1.797693134862316e+308, 1.797693134862316e+308], [-1.797693134862316e+308, 1.797693134862316e+308])
Threads: 4
(pdal pipeline readers.ept Debug) Registering dim X: double
(pdal pipeline readers.ept Debug) Registering dim Y: double
(pdal pipeline readers.ept Debug) Registering dim Z: double
(pdal pipeline readers.ept Debug) Registering dim Intensity: uint16_t
(pdal pipeline readers.ept Debug) Registering dim ReturnNumber: uint8_t
(pdal pipeline readers.ept Debug) Registering dim NumberOfReturns: uint8_t
(pdal pipeline readers.ept Debug) Registering dim ScanDirectionFlag: uint8_t
(pdal pipeline readers.ept Debug) Registering dim EdgeOfFlightLine: uint8_t
(pdal pipeline readers.ept Debug) Registering dim Classification: uint8_t
(pdal pipeline readers.ept Debug) Registering dim ScanAngleRank: float
(pdal pipeline readers.ept Debug) Registering dim UserData: uint8_t
(pdal pipeline readers.ept Debug) Registering dim PointSourceId: uint16_t
(pdal pipeline readers.ept Debug) Registering dim GpsTime: double
(pdal pipeline readers.ept Debug) Registering dim OriginId: uint32_t
(pdal pipeline Debug) Executing pipeline in stream mode.
(pdal pipeline readers.ept Debug) Overlap nodes: 309
(pdal pipeline readers.ept Debug) Overlap points: 8215660
(pdal pipeline readers.ept Debug) Streaming Data 1/309: 0-0-0-0
(pdal pipeline readers.ept Debug) Points : 12614
(pdal pipeline readers.ept Debug) Streaming Data 2/309: 1-0-0-0
(pdal pipeline readers.ept Debug) Points : 10146
(pdal pipeline readers.ept Debug) Streaming Data 3/309: 1-0-0-1
[...]
(pdal pipeline readers.ept Debug) Points : 38612
(pdal pipeline readers.ept Debug) Streaming Data 309/309: 4-14-9-7
(pdal pipeline readers.ept Debug) Points : 56730
(new_clouds) myuser@comp:~/phili$(new_clouds) myuser@comp:~/phili$ tree temp_data/
temp_data/
├── boundary.sqlite
├── clean.laz
├── clipper.geojson.tmp
├── denoised_ground.laz
├── denoised_histogram.png
├── density.sqlite
├── dtm.tif
├── E280N1553_LAZ_PL1.las
├── E280N1553_LAZ_PL1_WGS.laz
├── ept_phili_clipped.laz
├── ept_phili_cropped.laz
├── ept_phili_to_laz.laz
├── ground.laz
├── hillshade.tif
├── histogram.png
├── phili-classification.tif
└── thin.laz
0 directories, 17 files
(new_clouds) myuser@comp:~/phili$
rasterize

Apoi crează un fișier numit colours.txt și introdu codul de mai jos, pe caregdaldem îl poate folosi să aplice culori datelor, și QGIS îl poate folosi ca și corespondență de culori.
# QGIS Generated Color Map Export File
2 139 51 38 255 Ground
3 143 201 157 255 Low Veg
4 5 159 43 255 Med Veg
5 47 250 11 255 High Veg
6 209 151 25 255 Building
7 232 41 7 255 Low Point
8 197 0 204 255 reserved
9 26 44 240 255 Water
10 165 160 173 255 Rail
11 81 87 81 255 Road
12 203 210 73 255 Reserved
13 209 228 214 255 Wire - Guard (Shield)
14 160 168 231 255 Wire - Conductor (Phase)
15 220 213 164 255 Transmission Tower
16 214 211 143 255 Wire-Structure Connector (Insulator)
17 151 98 203 255 Bridge Deck
18 236 49 74 255 High Noise
19 185 103 45 255 Reserved
21 58 55 9 255 255 Reserved
22 76 46 58 255 255 Reserved
23 20 76 38 255 255 Reserved
26 78 92 32 255 255 Reservedgdaldem color-relief temp_data/phili-classification.tif colours.txt temp_data/classified-color.png -of PNG(new_clouds) myuser@comp:~/phili$ gdaldem color-relief temp_data/phili-classification.tif colours.txt temp_data/classified-color.png -of PNG
0...10...20...30...40...50...60...70...80...90...100 - done.
(new_clouds) myuser@comp:~/phili$

classified color

După aceea generează o imagine de intensitate relativă.
pdal pipeline classification.json \
--writers.gdal.dimension="Intensity" \
--writers.gdal.data_type="float" \
--writers.gdal.filename="temp_data/intensity.tif" \
-v 3pdal pipeline classification.json \
> --writers.gdal.dimension="Intensity" \
> --writers.gdal.data_type="float" \
> --writers.gdal.filename="temp_data/intensity.tif" \
> -v 3
(PDAL Debug) Debugging...
(pdal pipeline readers.ept Debug) Endpoint: ept_phili/
Got EPT info
SRS: PROJCS["WGS 84 / UTM zone 51N",
GEOGCS["WGS 84",
DATUM["WGS_1984",
SPHEROID["WGS 84",6378137,298.257223563,
AUTHORITY["EPSG","7030"]],
AUTHORITY["EPSG","6326"]],
PRIMEM["Greenwich",0,
AUTHORITY["EPSG","8901"]],
UNIT["degree",0.0174532925199433,
AUTHORITY["EPSG","9122"]],
AUTHORITY["EPSG","4326"]],
PROJECTION["Transverse_Mercator"],
PARAMETER["latitude_of_origin",0],
PARAMETER["central_meridian",123],
PARAMETER["scale_factor",0.9996],
PARAMETER["false_easting",500000],
PARAMETER["false_northing",0],
UNIT["metre",1,
AUTHORITY["EPSG","9001"]],
AXIS["Easting",EAST],
AXIS["Northing",NORTH],
AUTHORITY["EPSG","32651"]]
Root resolution: 59.8594
Query resolution: 5
Actual resolution: 3.74121
Depth end: 5
Query bounds: ([-1.797693134862316e+308, 1.797693134862316e+308], [-1.797693134862316e+308, 1.797693134862316e+308], [-1.797693134862316e+308, 1.797693134862316e+308])
Threads: 4
(pdal pipeline readers.ept Debug) Registering dim X: double
(pdal pipeline readers.ept Debug) Registering dim Y: double
(pdal pipeline readers.ept Debug) Registering dim Z: double
(pdal pipeline readers.ept Debug) Registering dim Intensity: uint16_t
(pdal pipeline readers.ept Debug) Registering dim ReturnNumber: uint8_t
(pdal pipeline readers.ept Debug) Registering dim NumberOfReturns: uint8_t
(pdal pipeline readers.ept Debug) Registering dim ScanDirectionFlag: uint8_t
(pdal pipeline readers.ept Debug) Registering dim EdgeOfFlightLine: uint8_t
(pdal pipeline readers.ept Debug) Registering dim Classification: uint8_t
(pdal pipeline readers.ept Debug) Registering dim ScanAngleRank: float
(pdal pipeline readers.ept Debug) Registering dim UserData: uint8_t
(pdal pipeline readers.ept Debug) Registering dim PointSourceId: uint16_t
(pdal pipeline readers.ept Debug) Registering dim GpsTime: double
(pdal pipeline readers.ept Debug) Registering dim OriginId: uint32_t
(pdal pipeline Debug) Executing pipeline in stream mode.
(pdal pipeline readers.ept Debug) Overlap nodes: 309
(pdal pipeline readers.ept Debug) Overlap points: 8215660
(pdal pipeline readers.ept Debug) Streaming Data 1/309: 0-0-0-0
(pdal pipeline readers.ept Debug) Points : 12614
(pdal pipeline readers.ept Debug) Streaming Data 2/309: 1-0-0-0
(pdal pipeline readers.ept Debug) Points : 10146
(pdal pipeline readers.ept Debug) Streaming Data 3/309: 1-0-0-1
(pdal pipeline readers.ept Debug) Points : 33239
(pdal pipeline readers.ept Debug) Streaming Data 4/309: 1-0-1-0
(pdal pipeline readers.ept Debug) Points : 9649
(pdal pipeline readers.ept Debug) Streaming Data 5/309: 1-0-1-1
[...]
(pdal pipeline readers.ept Debug) Points : 38612
(pdal pipeline readers.ept Debug) Streaming Data 309/309: 4-14-9-7
(pdal pipeline readers.ept Debug) Points : 56730
(new_clouds) myuser@comp:~/phili$gdal_translate temp_data/intensity.tif temp_data/intensity.png -of PNG(new_clouds) myuser@comp:~/phili$ gdal_translate temp_data/intensity.tif temp_data/intensity.png -of PNG
Input file size is 1315, 1532
Warning 6: PNG driver doesn't support data type Float32. Only eight bit (Byte) and sixteen bit (UInt16) bands supported. Defaulting to Byte
0...10...20...30...40...50...60...70...80...90...100 - done.
(new_clouds) myuser@comp:~/phili$
intensity original 
intensity increased brightness


Trasarea unei histograme folosind Python (src)
{
"pipeline": [
{
"filename": "temp_data/ept_phili_to_laz.laz"
},
{
"type": "filters.python",
"function": "make_plot",
"module": "anything",
"pdalargs": "{\"filename\":\"temp_data/histogram.png\"}",
"script": "histogram.py"
},
{
"type": "writers.null"
}
]
}# import numpy
import numpy as np
# import matplotlib stuff and make sure to use the
# AGG renderer.
import matplotlib
matplotlib.use('Agg')
import matplotlib.pyplot as plt
import matplotlib.mlab as mlab
# This only works for Python 3. Use
# StringIO for Python 2.
from io import BytesIO
# The make_plot function will do all of our work. The
# filters.programmable filter expects a function name in the
# module that has at least two arguments -- "ins" which
# are numpy arrays for each dimension, and the "outs" which
# the script can alter/set/adjust to have them updated for
# further processing.
def make_plot(ins, outs):
# figure position and row will increment
figure_position = 1
row = 1
fig = plt.figure(figure_position, figsize=(6, 8.5), dpi=300)
for key in ins:
dimension = ins[key]
ax = fig.add_subplot(len(ins.keys()), 1, row)
# histogram the current dimension with 30 bins
n, bins, patches = ax.hist( dimension, 30,
facecolor='grey',
alpha=0.75,
align='mid',
histtype='stepfilled',
linewidth=None)
# Set plot particulars
ax.set_ylabel(key, size=10, rotation='horizontal')
ax.get_xaxis().set_visible(False)
ax.set_yticklabels('')
ax.set_yticks((),)
ax.set_xlim(min(dimension), max(dimension))
ax.set_ylim(min(n), max(n))
# increment plot position
row = row + 1
figure_position = figure_position + 1
# We will save the PNG bytes to a BytesIO instance
# and the nwrite that to a file.
output = BytesIO()
plt.savefig(output,format="PNG")
# a module global variable, called 'pdalargs' is available
# to filters.programmable and filters.predicate modules that contains
# a dictionary of arguments that can be explicitly passed into
# the module by the user. We passed in a filename arg in our `pdal pipeline` call
if 'filename' in pdalargs:
filename = pdalargs['filename']
else:
filename = 'histogram.png'
# open up the filename and write out the
# bytes of the PNG stored in the BytesIO instance
o = open(filename, 'wb')
o.write(output.getvalue())
o.close()
# filters.programmable scripts need to
# return True to tell the filter it was successful.
return Truepython -m pip install -U matplotlib==3.2.0rc1
pdal pipeline histogram.json(new_clouds) myuser@comp:~/phili$ pdal pipeline histogram.json
anything:46: UserWarning: Attempting to set identical left == right == 0 results in singular transformations; automatically expanding.
(new_clouds) myuser@comp:~/phili$

Python histogram for laz file

Procesarea în tranșe (src)
# Create directory unless exists
mkdir -pv gtiles
# List files in Windows dos and iterate them
# use verbose to view logs
for %f in (*.*) do pdal pipeline denoise_ground.json ^
--readers.las.filename=%f ^
--writers.las.filename=../gtiles/%f
--verbose 4
# Create directory unless exists
mkdir -pv denoised_grnd
# List files in Linux shell and iterate them
ls laz_tiles/*.laz | \
parallel -I{} pdal pipeline denoise_ground.json \
--readers.las.filename={} \
--writers.las.filename=denoised_grnd/denoised_grnd{/.}.laz \
--verbose 4Ce urmează? Repetarea pașilor pentru Yosemite Valley, apoi să încerc și LasTools. Și, desigur, un 3D în Blender. 😀
PS: Cei de la Taal Open LiDAR Data au oferit între timp acces și la vizualizarea 3D în Potree, dacă vreți puteți să o admirați aici. Mai jos vă las un colaj Potree de pe calculatorul personal.
